
Embracing uncertainty: towards an innovative architecture for sensor-driven computing
Existing computing systems largely treat sensor measurements as though they were error-free. As a result, computing systems that consume sensor data and which implement algorithms such as ob-stacle avoidance may perform billions of calculations per second on values that might be far removed from the quantities they are supposed to represent. When these algorithms control safety-critical systems, unquantified measurement uncertainty can inadvertently lead to failure of subsystems such as object detection or collision avoidance. This can in turn lead to injury or fatalities and the prospect and evidence of such failures reduces trust in autonomous systems.
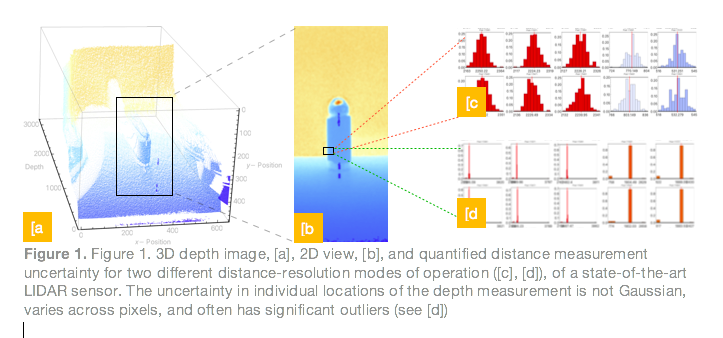
Figure 1 shows one concrete example of measurement uncertainty in the individual points in a pointcloud generated by a LIDAR sensor:
With the ever more pervasive use of sensors to drive computation and actuation such as in autonomous vehicles and robots which interact with humans, there is a growing need for computing hardware and systems software that can track information about uncertainty or noise throughout the signal processing chain.
The Physical Computation Laboratory research group is investigating new methods for quantifying how this uncertainty could affect al-gorithms which consume sensor data, as well as new classes of efficient algorithms (and hardware implementations) for making the best use of such sensor-level uncertainty characterization, with applications ranging from trustworthy autonomous systems to noisy intermediate-scale quantum computing.[1]
We investigate new ways to exploit information about the physical world to make computing systems that interact with nature more efficient and more trustworthy, by taking into account the noise and uncertainty inherent in all measurement in sensor-driven systems. Our research applies this idea to new hardware architectures for processing noisy or uncertain data, new methods for learning models from physical sensor data, and new methods for synthesizing state estimators (e.g., Kalman filters) and sensor fusion algorithms from physical system descriptions.[2]
Realizing these goals in practice involves equal measures of mathematical methods and theoretical work combined with the design and implementation of domain-specific languages and using the compilers for these domain-specific languages as the testbed for implementing new algorithms.
To ground our ideas, we frequently design processor- and FPGA-based custom hardware platforms as end-to-end testbeds.
[1] P. Stanley-Marbell, University of Cambridge (PI). EPSRC EP/V047507/1. Architectures and Distribution Arithmetic for Coupling Classical Computers to Noisy Intermediate-Scale Quantum Computers. January 2021 to January 2023.
[2] V. Tsoutsouras, S. Willis, and P. Stanley-Marbell. "Deriving Equations from Sensor Data Using Dimensional Function Synthesis”. To appear, Communi-cations of the ACM, Research Highlight, January 2021.